

Here is gallery of pics of my Autonomous bot. It a line follower robot car. This bot has evolved over 3 years, from 2004 to 2007. Generally people make 3-4 different bots in this period, however I stuck to same kind of chassis design because of lack of time to re-make whole chassis and funds .
| 1 |  |
Used at RAIT competition in 2005. First successful model . Very first model was with steppers and AT90S2313 which failed miserably. Circuit version 1.0 : Uses LM339 for sensors, ULN2803 for motor driving. |
| 2 |  |
Testing at home. Used at RAIT 2005. This was my 2nd robotics competition. I had made it perfect at home itself. On the competition venue, It just ran Gr8, without even reprogramming ! |
| 3 | 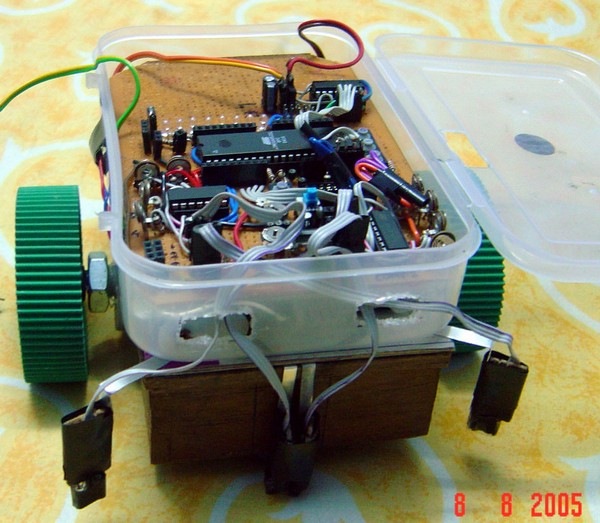 |
Same one, with slight close-up. Cells removed. |
| 4 |  |
Circuit version 2.0 started using onchip ADC. This reduced lot of clutter of comparators. Used L293D for bidirectional motor drive. Added MAX232 for serial communication. My mega16 development kit is based on this. |
| 5 |  |
Perspective view of the chassis of the line follower robot. Rebuilt chassis. I have used this in many competitions. |
| 6 | 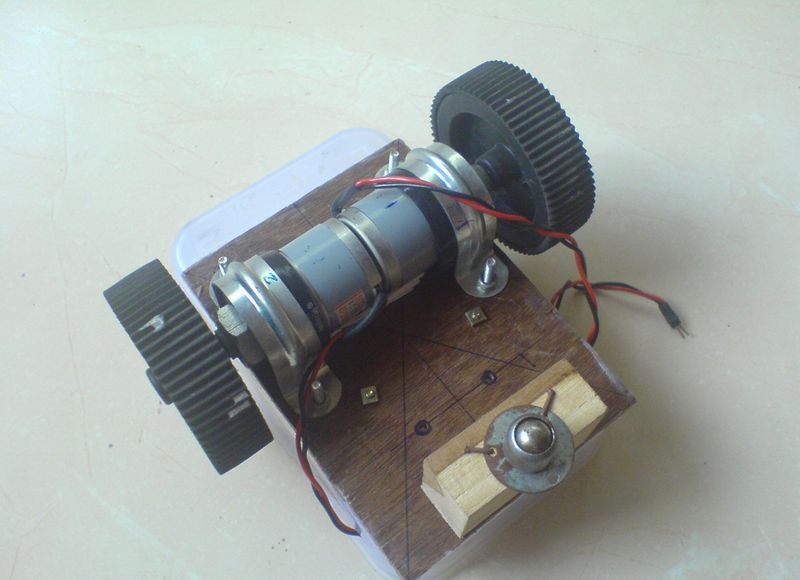 |
ottom view of the chassis of the line follower robot |
| 7 |  |
Simple Edge detector. Prevents itself from falling off the table edges. I have made this recently, for demonstration at robotics, workshop Somaiya Science college. |
Competitions that I won with my robo-car :
| 1st prize – autonomous robotics competition at Shah and Anchor College,Govandi – Kurla | [mar07] |
| 1st prize – autonomous robotics competition , DBIT colesseum’07 | [feb07] |
| 1st prize – autonomous robotics in Technovanza’06 – national technical festival of VJTI,Mumbai | [aug06] |
| Finalist – autonomous robotics competition, IEEE – RAIT Branch. | [aug05] |
| 2nd prize – autonomous robotics during Technovanza’05 – national technical festival of VJTI. | [aug05] |
| 2nd prize – autonomous robotics , Ideas’05-CSI student convention | [mar05] |
| 1st prize – autonomous robotics , 360 degrees – techfest held under IEEE Bombay section. | [feb05] |